
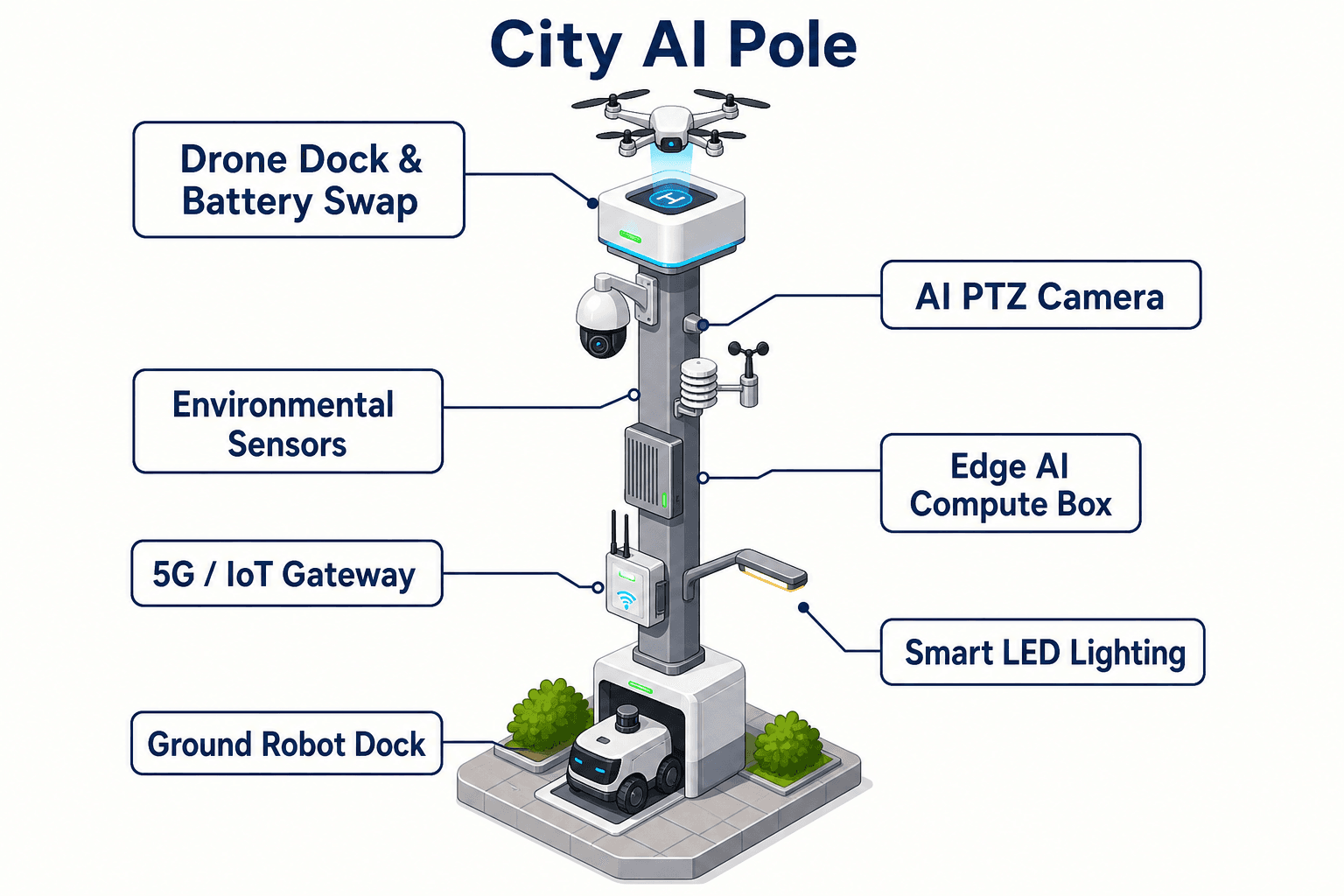
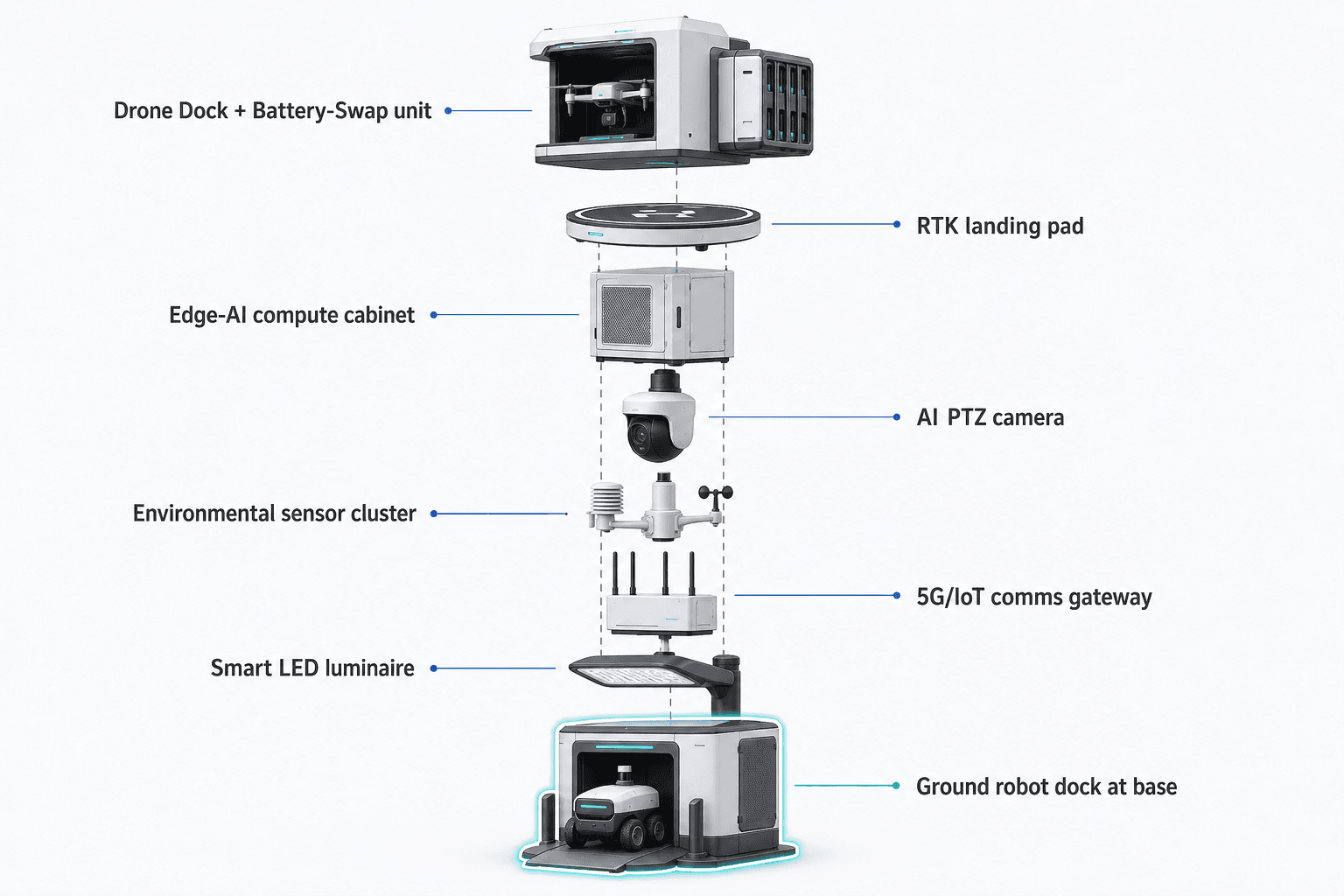
A City AI Pole, in this case SOLARTODO Sentinel Sky Hub, is a fully off-grid physical-AI urban edge node: a non-lighting intelligent pole with battery storage, 360° wrapped CIGS solar replenishment, edge compute, sensing, drone operations and ground robot support. This Kuala Lumpur configuration supports night traffic-incident response on a port corridor with local processing and human-authorized field action.
Incident Context: Flood-Season Pressure on the Kuala Lumpur Port Corridor
During flood season, emergency-management teams in Kuala Lumpur face a familiar pattern: rain intensity rises after dark, road shoulders become less reliable, visibility drops, and small incidents on freight corridors can turn into multi-agency events. The city itself is inland, but the wider Klang Valley depends on road movements between Kuala Lumpur logistics districts, industrial estates and the Port Klang gateway. When a stalled heavy vehicle, minor collision, fallen debris or floodwater obstruction appears at night, the first problem is not always the event itself. The first problem is availability: whether a verified field picture, a dispatched response asset and a durable communications point are available without waiting for a crew to reach the exact location.
This case study frames a proposed, illustrative corridor deployment of SOLARTODO Sentinel Sky Hub for a Kuala Lumpur emergency-management stakeholder. The corridor archetype is port-linked rather than downtown amenity focused: selected nodes would sit at traffic pinch points, flood-prone approaches, logistics entrances, perimeter roads and staging areas where response teams need eyes, compute and robotic action after hours. The objective is not to replace emergency services or traffic-control authorities. It is to provide a persistent physical-AI edge layer that can detect an abnormal traffic condition, support human assessment, dispatch a ground robot or friendly drone, and record the incident review package from the node itself.
Sky Hub is positioned here as a PURE smart pole, not a lighting asset. It has no lighting system. The pole functions as an off-grid micro-station with battery storage, 360° wrapped flexible CIGS thin-film replenishment, on-pole inference, environmental sensing, PTZ security sensing, autonomous drone operations, drone battery hot-swap, ground robot charging and a common-operating-picture command view. In a flood-season corridor, the design question is direct: can each node remain available through night response windows when crews, vehicles and power access are constrained? The proposed KPI framing therefore focuses on target availability, sortie continuity, robot readiness, incident-review completeness and the percentage of events where only de-identified metadata needs to leave the pole.
Review of the Traffic-Incident Workflow
The incident-review scenario begins with a night traffic anomaly on a port approach road. A vehicle stops in an unsafe position after heavy rain, surrounding traffic begins to compress, and water depth near the shoulder becomes uncertain. A conventional response may depend on a road user call, a patrol vehicle passing the scene, or fixed camera feeds that may not provide local environmental context. In the Sky Hub corridor configuration, the nearest node continuously runs local perception on its PTZ camera feed and environmental instruments. It can identify anonymous vehicle count changes, congestion build-up, intrusion into a restricted shoulder zone, crowd density around a stopped vehicle and perimeter movement near a logistics fence line. It does not require raw video to be uploaded for normal event assessment.
Once the on-pole edge module scores the anomaly, the incident enters the common-operating-picture view used by emergency-management operators. The system supports the operations loop described as sensing, authorized assessment and response, edge-compute scheduling, and field operations and maintenance. This is important for Kuala Lumpur flood-season operations because the decision is rarely binary. The operator may need to decide whether the scene is only a breakdown, a collision requiring dispatch, a floodwater blockage, a security intrusion near the corridor, or a mixed event that needs traffic, rescue, port security and maintenance coordination.
The robot-centered workflow then moves from observation to field action. A humanoid or service robot staged at the pole base can be released for autonomous patrol, close inspection, alarm response and air-ground coordination. It can approach the scene, inspect around barriers, check whether people are present near the stopped vehicle, assess visible water movement and return to the base for wireless charging. The friendly drone can launch for elevated corridor inspection, upstream traffic observation or floodwater reconnaissance. The key module focus is battery-swap: when the drone returns, a multi-bay rear-service magazine performs automated exchange of the depleted pack for a charged one, allowing consecutive sorties subject to operator authorization, weather limits and duty-cycle scheduling.
This matters most at night. A single drone flight can verify an incident, but repeated availability is what changes the emergency-management workflow. If the first sortie confirms a stopped vehicle, the second may check the upstream queue, the third may verify a diversion point, and a later sortie may confirm that recovery is complete. Because the node schedules energy, compute and field assets locally, it can prioritize incident tasks over routine patrols and preserve enough reserve for robot return, system health, communications and evidence packaging.
Off-Grid Node Design and Availability Planning
The proposed Sky Hub node is designed as a fully off-grid station: it uses battery storage with on-pole solar replenishment and does not depend on grid, city or site power. The pole body carries about 15 m² of 360° wrapped flexible CIGS thin-film over a vertical cylindrical form around 8 m tall and roughly 0.6 m wide. The nameplate range is approximately 2.4 to 2.7 kWp, but the practical engineering assumption is more conservative. A vertical cylinder collects direct sun on the sun-facing projection, not the whole wrap at once. In high-irradiance clear-sky regions, realistic output is roughly 0.8 to 1.1 kW DC peak, usually peaking mid-morning or mid-afternoon rather than at noon, with about 6 to 9 kWh per day.
Kuala Lumpur’s tropical conditions require an even more disciplined planning stance because rainfall, humidity, cloud cover and flood-season weather can reduce replenishment. The CIGS layer should therefore be treated as supplemental replenishment for a battery-backed micro-station, not as a promise of unlimited solar-only operation. The design uses 5 to 20 kWh-class storage, selected after site engineering, mission frequency and reserve-hour modeling. Drone and robot tasks are buffered by storage and scheduled by duty cycle, with the command view showing battery state, swap-magazine state, robot charge state, compute load and mission queue priority.
For an emergency-management buyer, availability is not a slogan; it is a planning metric. The target planning model should define how many nodes must be ready during flood-season nights, how many consecutive drone sorties are required before manual service, how often a robot must be able to leave and return, and what reserve should remain after a high-priority traffic incident. The battery-swap magazine helps availability because it separates drone mission continuity from slow single-pack charging. Multiple charged bays allow several consecutive sorties while the node manages recharge cycles, thermal limits and remaining reserve.
The same availability logic applies to data handling. Raw video and sensor streams stay on the pole for local processing. Only de-identified event and status metadata may leave the node for the command view, reports or integration with emergency-management systems. This PDPL/LGPD-oriented approach reduces bandwidth dependence during bad weather and supports privacy-by-design planning, while remaining subject to final legal, cybersecurity and engineering confirmation for the specific Malaysian deployment.
Robot-Led Response with Drone Battery-Swap Support
The differentiated operating value of this Kuala Lumpur corridor design is the combination of ground robot response and drone battery-swap continuity. The ground robot is the close-range responder: it can leave the pole base, inspect the immediate road edge, approach a stopped vehicle at a controlled distance, check a drainage inlet or barrier, and provide the operator with local status without sending a human responder into poor visibility as the first step. It can coordinate with the friendly drone overhead, using aerial context to choose a safer route or confirm whether the incident area is expanding.
The drone is the rapid regional scout. It can launch from the node, patrol the corridor segment, inspect upstream and downstream traffic, return for battery exchange and relaunch for follow-up tasks. The hot-swap process is rear-service and automated: after landing, the multi-bay magazine exchanges the depleted battery for a charged pack. This supports repeated flood-season incident review without an operator on site, subject to mission authorization and weather constraints. The value is not only longer flight time; it is shorter operational interruption between assessment cycles.
Counter-UAS coordination is included as a controlled safety function for critical-infrastructure zones near logistics and port-linked facilities. The pole can detect and track an unauthorized drone using its own sensing and optional partner-sensor inputs, including radar only when supplied externally by an approved partner system. The pole can then command its own friendly drone for a human-authorized, non-kinetic response such as soft aerial net-capture or close-approach deterrence. This is framed as coordination under operator control, not automatic escalation.
The node’s environmental monitoring also supports robot and drone decisions. Wind speed, wind direction, temperature, humidity, atmospheric pressure, noise, PM10, PM2.5 and illuminance contribute to mission gating and incident context. If wind or rain conditions make a drone sortie unsuitable, the robot can remain the primary field asset. If surface water or debris makes robot travel unsafe, the drone can provide aerial inspection first. This flexible air-ground pattern is why the system is better evaluated as a physical-AI edge node than as a conventional pole-mounted sensor.
Evaluation Model for Emergency-Management Buyers
The proposed deployment should be evaluated through an incident-review method rather than a generic technology trial. Each selected corridor location should be assessed for flood-season relevance, response distance, communications options, physical security, solar exposure, safe robot movement, drone launch clearance, maintenance access and integration with the stakeholder’s command workflow. The buyer should define target thresholds before deployment: node uptime target, minimum reserve energy, number of drone sorties per night-response window, robot readiness percentage, event-to-review package completeness, and acceptable time from anomaly flag to human decision.
No nation-scale rollout quantity, coverage area or achieved performance result is asserted here. A credible Kuala Lumpur program would start by mapping priority corridor segments, selecting representative node positions, and validating the operating model under local weather, airspace, road-safety and data-governance requirements. Engineering confirmation would determine final storage size, solar yield assumptions, foundation design, communications path, robotic route envelope and the number of battery magazine bays needed for the target duty cycle.
The incident-review package is the management output. For each traffic event, the node can preserve local evidence, generate de-identified metadata, log operator decisions, record drone and robot tasking, show battery-swap state transitions, document environmental conditions and summarize what field action occurred. Emergency-management teams can use these packages to review whether availability targets were met, whether response assets were assigned appropriately, and whether corridor coverage should be adjusted before the next flood-season window.
For a port-linked Kuala Lumpur corridor, the strategic benefit is operational continuity at the edge. The node gives emergency managers a local, off-grid point of sensing, compute, air-ground action and review. It does so without claiming unlimited solar autonomy, without sending raw video off the pole as a default operating model, without relying on named third-party platforms, and without positioning itself as a lighting product. The practical buyer question becomes measurable: which corridor incidents require persistent night availability, and how many Sky Hub nodes are needed to keep robot and drone response ready when flood-season conditions make first verification hardest?
System Configuration
| Parameter | Configuration |
|---|---|
| Pole form | SOLARTODO Sentinel Sky Hub PURE smart pole, non-lighting cylindrical edge-node body, approximately 8 m tall with 360° CIGS wrap |
| Energy system | Fully off-grid battery-backed micro-station with 5-20 kWh-class storage and supplemental CIGS solar replenishment, subject to site engineering |
| Drone battery-swap | Rear-service automated multi-bay battery magazine for charged-pack exchange and consecutive authorized sorties |
| Ground robot support | Base-side wireless charging zone for humanoid or service robot patrol, inspection, alarm response and return-to-charge operation |
| Edge AI compute | Jetson-class Orin- or Thor-class on-pole inference module for local video, sensor and mission scheduling workloads |
| Sensing package | AI PTZ perception plus wind speed, wind direction, temperature, humidity, pressure, noise, PM10, PM2.5 and illuminance |
| Command view | Common-operating-picture dashboard for anomaly review, task queueing, mission logs, fleet health, battery state and human authorization |
How It Works
- On-pole PTZ perception flags a night traffic anomaly, queue build-up or restricted-zone intrusion near the port corridor.
- Edge AI scores the event locally and combines it with weather, air-quality, noise and illuminance readings.
- The common-operating-picture view presents the event to an emergency-management operator for human authorization.
- The node dispatches a ground robot and, if conditions allow, launches a friendly drone for corridor inspection.
- The drone returns for automated battery hot-swap and may be redeployed for follow-up views while the robot returns to wireless charging.
- The node records mission logs, battery state transitions, operator decisions and de-identified incident metadata for review.
Planning Assumptions (Indicative)
Illustrative planning inputs a buyer can recompute — target metrics, not achieved results. Subject to final engineering confirmation.
| Metric | Planning assumption | Indicative value |
|---|---|---|
| Night-response availability | Target share of selected corridor nights where each node remains ready for incident sensing, robot dispatch and at least one drone sortie | ~95% planning target |
| Drone sortie continuity | Battery-swap magazine supports repeated flood-season inspection cycles before manual service, subject to weather and reserve limits | ~3-5 consecutive authorized sorties per event window |
| Robot field inspection | Ground robot handles first-look inspection for selected low-to-medium risk traffic anomalies before a human crew enters the scene | ~2-4 automated inspection tasks per night window |
| Manual patrol displacement | Routine night corridor checks are shifted from vehicle patrol to scheduled drone and robot patrol where regulations and safety rules allow | ~6-10 patrol checks per week automated |
| Incident-review completeness | Each flagged event produces a local log package with de-identified metadata, task history, environmental context and operator decisions | ~90% target package completeness |
Deployed Equipment
- SOLARTODO Sentinel Sky Hub pole-form physical-AI edge node
- Battery-backed off-grid power cabinet with 360° wrapped flexible CIGS replenishment
- AI PTZ camera and local perception stack
- Nine-parameter environmental monitoring package
- Autonomous drone bay with multi-bay battery hot-swap magazine
- Humanoid or service robot wireless charging base
- On-pole Jetson-class edge compute module
- Common-operating-picture command software for authorized operations
Frequently Asked Questions
Is this Kuala Lumpur case study claiming an active government rollout?
No. This is a proposed and illustrative configuration for an emergency-management buyer evaluating port-linked corridor response in the Kuala Lumpur and Klang Valley context. It does not claim a specific customer, node quantity, coverage area, achieved response time or certified result. Final deployment scope would require engineering, legal, airspace, safety and procurement confirmation.
Why is availability the main KPI for this corridor use case?
Flood-season night incidents are difficult because the first verified field picture may arrive late, especially when rain, congestion and road conditions slow manual response. Availability measures whether the node can keep sensing, compute, drone sorties, robot readiness, communications and evidence logging online during the response window. It is a better planning KPI than a single flight duration or camera specification.
How does drone battery hot-swap improve emergency response?
The battery-swap magazine reduces the interruption between aerial inspections. A landed drone can receive a charged pack through an automated rear-service exchange and then be redeployed for another authorized task. For a traffic incident, that can mean one sortie to verify the event, another to inspect the upstream queue and a later sortie to confirm recovery, all governed by energy reserve and weather limits.
What role does the ground robot play compared with the drone?
The robot is the close-range inspection asset. It can patrol near the pole, approach a stopped vehicle area at a controlled distance, inspect debris, observe water at road level and return to wireless charging. The drone provides wider overhead context. Together they support air-ground coordination, with the operator choosing the safest asset based on incident type, weather and route conditions.
Does raw video leave the pole for processing?
The intended operating model keeps raw video and sensor data on the pole for local edge processing. The command view may receive de-identified event and status metadata, such as anomaly type, asset state, environmental readings and mission logs. This is a PDPL/LGPD-oriented design approach, not a statement of completed legal certification or automatic compliance for every site.
Is the Sky Hub powered only by solar energy?
The system is fully off-grid, but that does not mean unlimited solar-only operation. The 360° CIGS wrap is a supplemental replenishment layer for a battery-backed micro-station. Practical output depends on sun angle, weather and site exposure, so drone and robot missions are buffered by 5-20 kWh-class storage and scheduled by duty cycle.
How is unauthorized drone activity handled near critical infrastructure?
The node can support detection, tracking and command coordination for unauthorized drone events, with human authorization required for mitigation. Its friendly drone may be tasked for soft aerial net-capture or close-approach deterrence where permitted. Radar is not built into the pole; it may only be considered as an optional partner-sensor input in a site-specific design.
Explore Further
- City AI Pole / smart streetlight product line
- More smart-city deployment cases
- Talk to our engineering team
Planning a similar physical-AI deployment for streets, campuses or public spaces? Request an engineering consultation